NAO机器人
NAO是一个57厘米高的可编程仿人机器人。其关键组件如下:拥有25个自由度(DOF)的身体,其关键部件为电机与致动器。
硬件平台
NAO是一个57厘米高的可编程仿人机器人。其关键组件如下:
拥有25个自由度(DOF)的身体,其关键部件为电机与致动器。
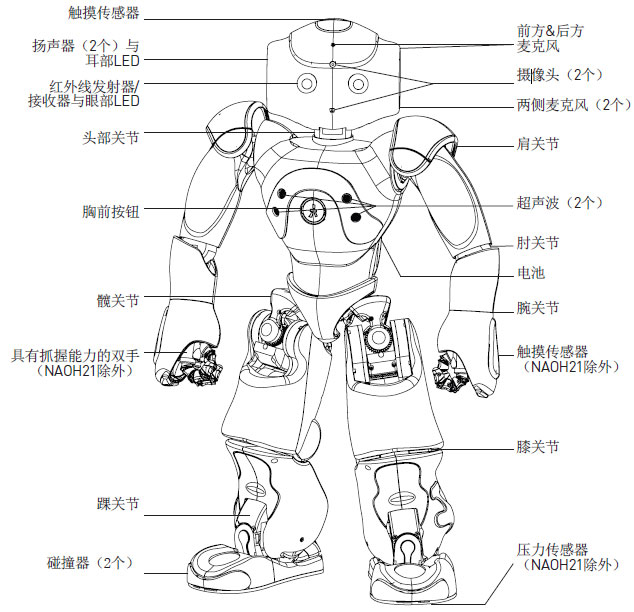
一系列传感器:2个摄像头、4个麦克风、1个超声波距离传感器、2个红外线发射器和接收器、1个惯性板、9个触觉传感器及8个压力传感器。
用于自我表达的器件:语音合成器、LED灯及2个高品质扬声器。
一个CPU(位于机器人头部),运行一个Linux内核,并支持ALDEBARAN公司自行研制的专有中间件(NAOqi)。
第二个CPU(位于机器人躯干内)。
NAO是一个57厘米高的可编程仿人机器人。其关键组件如下:
拥有25个自由度(DOF)的身体,其关键部件为电机与致动器。
一系列传感器:2个摄像头、4个麦克风、1个超声波距离传感器、2个红外线发射器和接收器、1个惯性板、9个触觉传感器及8个压力传感器。
用于自我表达的器件:语音合成器、LED灯及2个高品质扬声器。
一个CPU(位于机器人头部),运行一个Linux内核,并支持ALDEBARAN公司自行研制的专有中间件(NAOqi)。
第二个CPU(位于机器人躯干内)。
一个55瓦时电池, 根据使用方式的不同,可为NAO提供1.5小时、甚至更长的自主时间。
NAOqi
构建机器人的应用程序具有挑战性:
应用程序建立在大量先进的复杂技术之上,如语音识别、物体识别、地图构建等。
应用程序必须安全可靠,而且能够利用有限的资源、在有限的环境中运行。
嵌入式软件NAOqi包含一个跨平台的分布式机器人框架,快速、安全、可靠,为开发人员提供了一个全面的基础,以提高、改进NAO的各项功能。
NAOqi使算法的API可供其它算法使用。通过该软件,用户还可选择将模块在NAO上运行或是在一台电脑上远程运行。
用户可在Windows、Mac或Linux系统下开发代码,并通过C++、Python、Urbi、.Net等多种语言进行调用。建立在该框架之上的模块提供丰富的API接口,以便与NAO互动。
NAOqi可满足一般机器人开发的需要:并行,资源,同步,事件。
正如在其它框架中一样,NAOqi中也包含通用层。这些通用层专为NAO设计。通过NAOqi,不同模块(如运动、音频、视频等)之间可协调沟通,还可实现齐次规划,并与ALMemory模块共享信息。
